








今年的春節聯歡晚會舞臺上,人形機器人以整段復雜編排、穩定協同的方式,與真人演員同臺完成高強度表演。過去一年,我們在馬拉松賽事、行業大會、城市示范應用現場,頻繁看到人形機器人的身影。從公開競技到產業場景試運行,從實驗室樣機到商業化測試平臺,當行業關注點從“表演”走向“實干”,具身智能開始進入一個更為冷靜、也更為關鍵的階段——底層能力建設。算法是否標準化?數據體系是否可復用?控制平臺是否具備跨場景遷移能力?這些問題,決定了機器人產業能否從示范應用走向規模部署。
2月28日,第二屆智能機器人通用技術底座開發者大會暨啟智技術成果發布會隆重召開,大會把焦點放在開發工具鏈、數據體系構建與控制平臺架構上,試圖回答一個更現實的問題:機器人產業的規模化應用,通用技術底座準備好了嗎?
從能力展示到系統落地:三大結構性矛盾倒逼底座升級
具身智能近年來在運動控制層面取得明顯突破,機器人可以完成奔跑、平衡控制與復雜抓取,硬件穩定性持續提升。然而,當應用場景從展示轉向真實生產與服務環境,產業長期存在的結構性矛盾逐漸顯現。
市場并不缺需求。制造、零售、醫療等領域,對機器人替代部分重復性崗位的期待一直存在。但是當其真正進入現場部署時,難題往往接踵而至:任務邏輯需要工程師反復示教,參數調試高度依賴人工經驗,不同場景之間難以遷移復用。與此同時,“小腦”與“大腦”的能力并不在同一進度線上。長程任務理解、多步驟決策、跨環境泛化能力,仍然是制約機器人走向實用化的關鍵因素。更值得關注的是生態層面的割裂。一方面,國產核心部件與整機能力不斷成熟,硬件基礎日益夯實;另一方面,操作系統、開發工具鏈與技能沉淀機制仍然分散,不同品牌之間的遷移成本高,已有能力難以轉化為通用資產。
因此,當行業的關注點從“單點突破”轉向“系統能力”時,啟智給出了自己的答案:構建一套可持續演進的通用技術底座。
構建三位一體的技術底座:讓能力沉淀為產業資產
過去,一個機器人新技能的實現,往往意味著數周甚至數月的示教與調試。啟智在發布會上推出的墨斗IDE全新功能——Vibe Coding,打破機器人開發長期依賴專業工程師示教與編程的壁壘,其核心在于以自然語言驅動任務生成,讓最懂業務的人直接描述需求,由系統自動轉化為流程圖與可執行代碼,真正實現“意圖直出”。
面對專業開發者,墨斗IDE可以通過模型輕量化技術提升仿真流暢度;通過一鍵生成DXF工程圖功能,讓仿真布局與現場的CAD圖紙無縫銜接,確保“所見即所得”。
墨斗IDE為何能如此高效?答案在于底座協同。它并非孤立工具,而是建立在大衍數據平臺的技能模型與Openmind OS控制體系之上,前端的“自然語言直出”,背后是完整的數據與控制支撐。
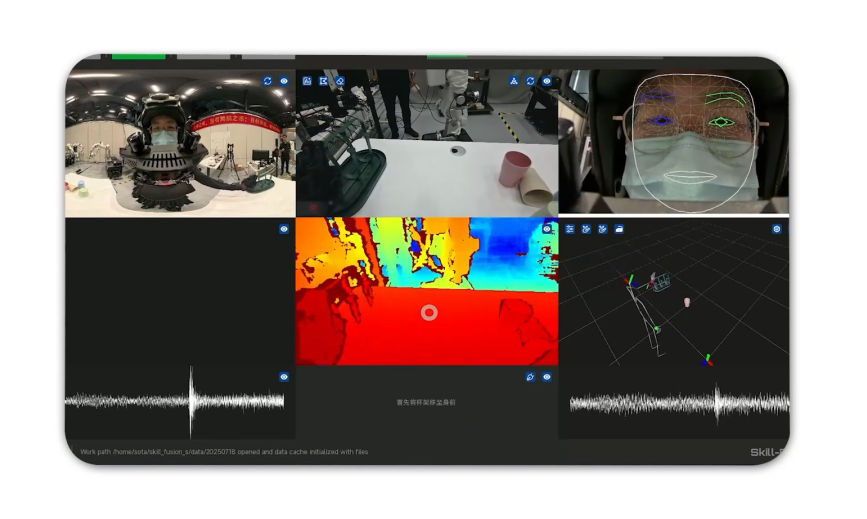
正因如此,數據體系的升級,是本次發布會另一條主線。很多開發團隊最大的時間消耗并不在算法,而在數據采集、標注與治理。升級后的大衍數據平臺,正在把這一過程重構為標準化流程。異構數采模塊實現對VR遙操、多模態動捕服及光學動捕系統的統一接入,等于為不同機器人本體建立了一套“通用適配接口”。自動標注與質量評估形成數據治理的“智能雙核”,結合強化學習工具鏈與GOPS強化學習軟件,讓模型訓練周期顯著壓縮。

大衍數據平臺的長期目標,是構建一個開放共享的機器人“技能庫”。這一體系以“蕪湖矽客機器人未來社區”的多元真實場景為基礎,涵蓋工業、服務與家庭環境,使機器人在真實與仿真結合的條件下開展大規模、多樣化訓練,確保技能來源于真實需求。
與此同時,通過HumanGPT與RobotGPT的協同機制,前者負責理解和學習人類動作意圖,轉化為數字化技能模型,后者則將這些技能適配至不同機器人本體,實現跨平臺遷移與復用。最終,人類示范與機器自主學習的成果將持續沉淀,形成可迭代進化的技能生態。
如果說墨斗IDE解決的是開發效率,大衍平臺回應的是智能成長,那么Openmind OS則是整套底座能否落地的關鍵一環。發布會上,啟智將其定義為“打通思考與行動的最后一道關卡”。在行業普遍面臨“開源算法活躍、控制系統封閉”的現實背景下,Openmind OS采用分層架構,讓實時控制與智能算法在同一系統中協同運行。系統兼容ROS生態,同時在關鍵控制模塊實現自主化替代,為跨平臺遷移、多機協同與安全運行提供統一基礎。
大會現場通過一段商超理貨實景演示,對系統能力進行了集中驗證。圍繞“倉庫取貨—開箱處理—商品上架”的完整流程,墨斗IDE以自然語言快速生成任務編排,Openmind OS統一調度復合機器人與人形機器人協同作業:前者完成導航與搬運,后者承擔開箱、識別、抓取與精準擺放,全程無需人工干預。機器人穩定、靈巧的操作能力,則源于大衍數據平臺訓練形成的技能模型支持。該案例以真實場景打通任務生成、協同執行與技能支撐的閉環,展現了機器人自主作業從概念走向實踐的可行路徑。
yobot系列發布:底座能力的系統驗證
除了通用技術底座的升級外,大會期間,啟智發布了全新機器人平臺家族——yobot系列,作為通用技術底座能力的產品化呈現,這一基于統一技術架構構建的機器人產品系列,覆蓋運動探索、服務交互與勞動執行等不同應用方向,用于驗證底座在真實場景中的工程可行性。
其中,R2V1主要承擔運動控制與算法訓練驗證任務,W2面向醫療服務場景提供交互與導引能力,R2V2則定位為高強度勞動機器人,已進入商超等環境執行理貨與補貨作業。不同形態機器人共享底座能力,使開發、訓練與部署形成統一技術路徑。從運動驗證到服務交互,再到勞動執行,yobot系列展示了不同場景能力,也構建起通用技術底座持續迭代的數據來源與應用反饋通道,形成從研發到落地的閉環路徑。
結語
在技術體系持續演進的同時,啟智同步構建圍繞通用技術底座的產業與研發生態。過去一年,公司與多所高校開展真實機器人平臺聯合研究,并與清華大學共建“具身智能計算與感知聯合研究中心”,推動前沿算法在國產平臺與真實場景中驗證落地。啟智在大會上正式發布“啟智開發者扶持計劃”,區分研究型與應用型路徑,旨在將少數人的科研成果轉化為服務多數人開發的能力。同時,在工業制造、醫療服務與未來社區等場景中,通過POC持續沉淀工程經驗,加速底座能力迭代升級。

當具身智能邁向規模化部署的臨界點,決定產業節奏的,將是系統能力的可復制與可擴展。啟智以技術、產品與生態協同推進,讓具身智能真正從“演示”走向“實干”。通用技術底座的成熟度,終將決定機器人產業落地的速度與高度。


