






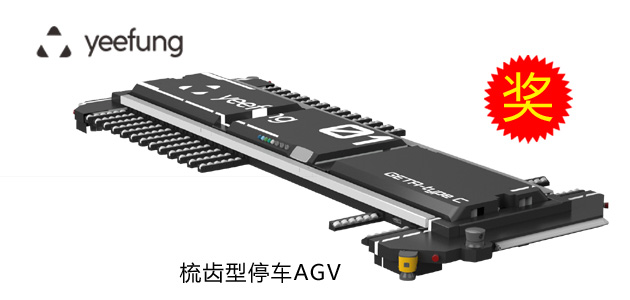
怡豐機器人“梳齒型停車AGV”榮獲鐳神杯·2015-2016年度十佳創新產品獎
產品描述:
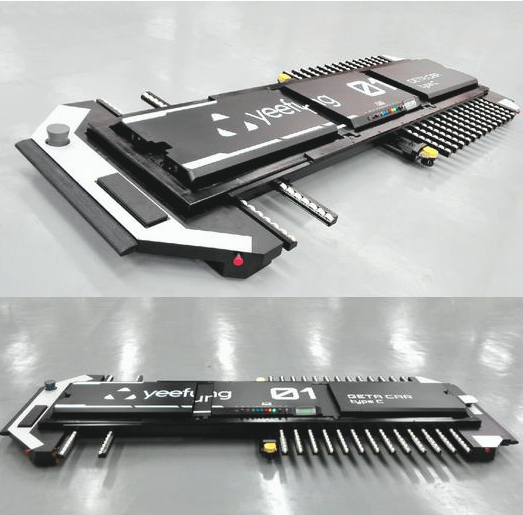
一、 產品名稱:梳齒型停車AGV(GETA CAR-type C)(一)概述 梳齒型停車AGV是一種用于搬運汽車的智能搬運機器人,屬于全球首創的“激光導航+梳齒交換”汽車搬運機器人。定位精準誤差小于5毫米,行駛速度最高達到了1.5m/秒,平均載重2.5噸,存車時間120秒。適用于現有經改造的或新建的平面停車庫、立體車庫等汽車搬運領域,可實現全自動、無軌道、無人化的精準泊車,讓停車位增加20%-40%以上。若與怡豐立體車庫配合使用,多層設計讓“平方”變“立方”,空間利用率可提高100%。
利用AGV的柔性特征,停車機器人擺脫傳統的立體車庫的軌道和線纜,可以在大平面上360度自由行走,適應各種復雜的停車環境。傳統人工停車需要經歷尋找車位、倒車、步行取車、尋找出入口、停車收費、車庫擁堵等環節,整個過程花費大量的時間和精力。而使用停車機器人后,您只要把車停在寬敞明亮的停車平臺上,在刷卡機上簡單操作,系統確認停車后即可離開。怡豐自主開發的一款車庫管理軟件,至少可以調度100臺AGV同時運作,保證車輛通行順暢。
自動停車機器人顛覆了傳統停車設備,改變人們傳統的停車方式,能讓用戶體驗科技帶來的智能化服務,把停車變成一件輕松簡單的事情。有效地解決目前停車難和存量停車場無法增量改造的難題。
(二)工作原理
梳齒型AGV的工作原理是內梳齒固定,外梳齒設置在AGV上,可進行上下交替運動,通過AGV的舉升機構上下升降即外梳齒的上下運動實現車輛的交接。每個車位設有固定的梳型架,需對地面打孔。出入口停車平臺也需設置停車梳型架。將需要停放的車輛開到停車場入口的一個平臺上,自動停車機器人就會將車輛運走,2分鐘左右就可將車輛放置在合適的位置。當用戶需要取車時,通過手機App點擊操作或提前預約,AGV在2分鐘左右就會把車輛開到停車場門口。在機器人“工作”期間,停車場無需工作人員,駕駛員也不用進入停車場內部,只需要將汽車駛入停車平臺即可,實現真正意義上的“無人停車”。
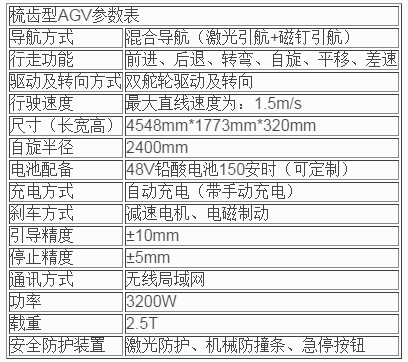
二、 產品性能指標及具體參數
三、 梳齒AGV單機創新點及優勢:
1、精度高。機身主要采用激光導航為主,磁釘導航為輔的雙重導航方式,使AGV定位更加精確,定位精度誤差±5mm,導航精度誤差±10mm。在AGV行駛路徑的周圍安裝位置精確的激光反射板,AGV通過發射激光束,同時采集由反射板反射的激光束來確定其當前的位置和方向,并通過連續的三角幾何運算來實現車輛導引。與此同時,在某些不易布置反射板的區域,在地上打磁釘,通過磁感應信號使AGV在規定路線內能精確行駛。精度越高,就能使車位擺放更加緊密,加大空間的利用率。
2、動力強。自主研發雙舵輪驅動單元,效率高,動力十足,速度最高可達1.5 m/s。采用了臥式電機設計,體積小,使AGV更低矮,機體小型化。
3、力氣大。舉升機構承重力大。通過齒輪齒條的運動傳遞動力,舉升高度152mm, 平均承重2.5噸,最高可達3噸,適合市面上98%的車型。舉升夾抱式的升降裝置,使存取車輛時平穩、快速、精準,且噪音較小。同時,設有自動對中裝置,節省空間的同時提高了車輛交換時的效率。
4、能耗低。一臺AGV取一輛車平均耗電僅約0.5度能耗小費用低,整個停車場無需人工看護和操作,直接減少對人工成本投入,節約大量人力資源。同時,免去傳統人工停車期間產生的大量汽車尾氣。
5、全方位行走。梳齒AGV采用全方位驅動單元,可以實現前進、后退、轉彎、自旋、平移、差速行走,360度旋轉等自主行徑路線。同時在AGV上設計了浮動結構,使其在行走時起到減震作用,可以彈性適應更多的不同的停車環境,更加貼合地面。
6、智能充電。停車機器人采用了鉛酸電池,會在無搬動任務時自動到充電樁處進行充電,也可手動充電,保證AGV供電的持續性和可靠性。
7、三重安全防護。AGV前端的激光雷達在行駛過程中360度無死角發射激光,當檢測到離障礙物1m左右時會先減速后停車。車身還安裝了機械式防撞條以及急停按鈕,可以在各種情況下保證AGV系統以及AGV周邊操作人員及設備的安全。另一方面,使用停車機器人省去了人工停車時刮蹭車輛的風險,安全等級高。每臺AGV獨立運行,一臺發生故障也不會影響整個車庫正常運作。
8、對車胎無損害。AGV的兩側梳齒上設計了數個會滾動的白色小輪,精巧,簡單。主要作用就是減小車輛交換過程中對車胎的損害。車輛在交換過程中,梳齒進行錯位交叉移動,車輪胎在白色小輪上滾動,左右調整車輛位置,讓車輛交換時位置更精確、穩定。
9、搬運效率高。傳統立體車庫一般只能用一臺汽車搬運器進行作業,在高峰存取車時間段內,存取的車輛需要排隊,造成單個車輛存取時間過長,存取車輛效率變低。停車機器人最多可實現100臺同時作業,搬運效率是傳統搬運方式的數倍。
四、應用范圍及市場地位
2016年,停車場建設成為國家基礎建設重點支持的四大方向之一。自2015年8月發改委等八部委聯合發布《關于加強城市停車設施建設的指導意見》后,全國各大城市推進落地的配套細則、停車建設實施意見、具體改革措施都相繼出臺,明確指出要增加車位供給,緩解停車難的問題,深入推進智能停車行業的發展。隨著城市土地資源的進一步緊缺,汽車數量的進一步增長,大密度停車場是未來建設的主流形式。
以國家大力發展停車產業為契機,我們公司引領行業先鋒,率先提出將AGV應用于停車領域,并發明了國內首臺“激光+梳齒交換”停車機器人。不僅可以解決停車末端復雜的環節,讓停車更高效簡潔,而且可以在舊式傳統車庫上進行改造,節省建設資本。可以說是為廣大停車困難戶帶來的福音,同時也為機器人應用領域提供了新的需求空間。從增加停車位供給的角度來講,土地利用率高的智能停車庫尤其適合寸土寸金的中心城區。對有限的城市空間,加快停車設施建設是一種應對之策,但單靠傳統的停車方式已經無法滿足現有的停車需求。從長期的需求來講,自動駕駛未來肯定會被普及,自動停車機器人代表著下一步科技創新的方向。高效停車是剛需,需求帶動市場,“停車難”既是一個急待解決的城市交通問題,同時也預示著巨大的市場機會。怡豐停車設備將努力趕超德國產品,有望成為世界第一品牌,智能停車庫將處于行業需求爆發期,預期經濟收入非常可觀。
五、專利及獲獎情況:
已經獲得一種AGV梳型搬運機器人實用新型專利1項,一種AGV梳型搬運機器人發明進入審查公示階段、PCT進入國際檢索報告階段。

關于怡豐:深圳怡豐機器人科技有限公司成立于2014年11月,屬深圳怡豐自動化科技有限公司的全資子公司,具有獨立法人和獨立核算資質。經營范圍包括自動化倉儲物流設備、自動化分揀系統以及自動化立體車庫智能搬運的研發、生產和銷售。公司擁有一批專業的AGV研發人員,堅持獨立自主創新,主攻高端搬運機器人研發領域。怡豐不僅擁有自主研發的核心技術,更是傳統制造業向智能制造轉型升級的典范。同時,與美國科爾摩根公司建立了合作伙伴關系、與香港中文大學簽訂戰略合作協議、與北京理工莫斯科大學共同成立了院士專家工作站聯合組建智能制造工程中心以及與浙江科技學院聯手創建智能物流裝備研究院,擁有業內最強的產學研鏈條。


