







無(wú)人機(jī)發(fā)展至今,在續(xù)航和以及功能上的進(jìn)化已經(jīng)到了一定瓶頸,于是,世界上主流的消費(fèi)級(jí)無(wú)人機(jī)廠商便開(kāi)始將安全性作為接下來(lái)產(chǎn)品的發(fā)力點(diǎn),紛紛自開(kāi)發(fā)了自家的“避障系統(tǒng)”(Obstacle Avoidance)。
所有無(wú)人機(jī)面臨的難題當(dāng)中,“避障”屬于對(duì)技術(shù)和精度要求最高的一種。
讓無(wú)人機(jī)自主感知周?chē)h(huán)境并對(duì)接下來(lái)的飛行軌跡做出規(guī)劃,這件看似簡(jiǎn)單的事情對(duì)無(wú)人機(jī)來(lái)說(shuō)是個(gè)很大挑戰(zhàn),要想很好的解決這個(gè)問(wèn)題需要無(wú)人機(jī)廠商自身在計(jì)算機(jī)視覺(jué)、超聲波、雷達(dá)定位等方面有足夠的技術(shù)積累。
那么,目前市面上主流的消費(fèi)級(jí)無(wú)人機(jī),比如大疆、YUNEEC昊翔、Parrot等都分別采用了什么樣的自動(dòng)避障系統(tǒng)呢?
昊翔 YUNEEC Typhoon H——復(fù)合避障
早在年初的CES上,昊翔 YUNEEC 就展示了其搭載 Intel Realsense 傳感器的室內(nèi)避障系統(tǒng),直到前不久的 CES Asia,這款消費(fèi)級(jí)的產(chǎn)品Typhoon H正式亮相,并展示了其最新的室外復(fù)合避障系統(tǒng)。

昊翔無(wú)人機(jī)/圖 來(lái)源網(wǎng)絡(luò)
如果說(shuō)此前的室內(nèi)避障演說(shuō),是一次針對(duì)無(wú)人機(jī)智能化想所未想的概念,那么相較于目前普遍存在的避障概念,此次高精度辨別障礙物并進(jìn)一步規(guī)避的實(shí)現(xiàn),則是無(wú)人機(jī)技術(shù)在智能化方面的飛越。
實(shí)際演示中,開(kāi)啟壁障系統(tǒng)的Typhoon H Realsense 可順利實(shí)現(xiàn)跟隨過(guò)程中對(duì)場(chǎng)景中樹(shù)木的識(shí)別及躲避。
YUNEEC昊翔的Typhoon H Realsense 版所擁有的是超聲波、可見(jiàn)光+結(jié)構(gòu)光復(fù)合避障。臺(tái)風(fēng)H機(jī)身前部?jī)蓚€(gè)圓孔為超聲波傳感器,能通過(guò)收發(fā)超聲波的方式,針對(duì)聲波往返時(shí)間來(lái)計(jì)算出與障礙物的距離。
避障組件/圖 來(lái)源網(wǎng)絡(luò)
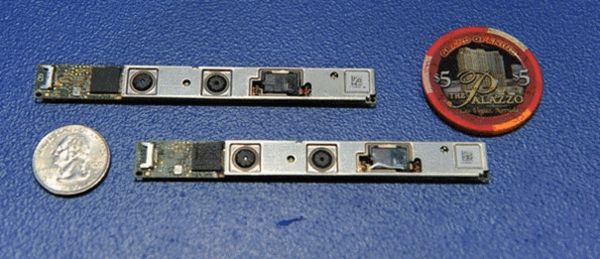
兩個(gè)圓孔下方的長(zhǎng)條狀物體,就是臺(tái)風(fēng)H黑科技稱(chēng)號(hào)的來(lái)源——Intel RealSense模組。該模組采用了Intel實(shí)感技術(shù),能將2個(gè)紅外線攝像頭、1個(gè)紅外線發(fā)射器和1個(gè)RGB標(biāo)準(zhǔn)攝像頭產(chǎn)生的信息集成到一顆指甲大小的圖像處理器上,而進(jìn)一步對(duì)物體表面進(jìn)行精細(xì)建模,構(gòu)建出三維空間信息。

昊翔無(wú)人機(jī)的避障攝像頭/圖 來(lái)源網(wǎng)絡(luò)
在自然光充足的情況下(白天),臺(tái)風(fēng) H Realsense 版通過(guò)RealSense模組可以識(shí)別10米左右的障礙物,并分辨出他們的形狀和位置。在夜晚,借助主動(dòng)紅外線發(fā)射器,臺(tái)風(fēng) H Realsense 版也能感知5米左右的障礙物。
大疆精靈 Phantom 4——雙目測(cè)距法
今年3月5日,大疆正式發(fā)布了全新的精靈4,不負(fù)眾望搭載了自動(dòng)避障功能,原理是雙目測(cè)距法。光線充足的環(huán)境下,檢測(cè)距離達(dá)到在0.7米-15米,且能夠根據(jù)飛行的速度控制無(wú)人機(jī)的飛行速度,調(diào)整停止的時(shí)刻,避免發(fā)生碰撞。

大疆無(wú)人機(jī)/圖 來(lái)源網(wǎng)絡(luò)
需要注意的是,Phantom 4 并沒(méi)有采用全向避障,也沒(méi)有超聲波傳感器,目前僅能實(shí)現(xiàn)正前方的檢測(cè)。同時(shí)基于這項(xiàng)技術(shù),Phantom 4 可以通過(guò)視覺(jué)傳感器和軟件算法,在一定條件下自動(dòng)規(guī)劃躲避的路線。
而所謂雙目立體視覺(jué),有點(diǎn)類(lèi)似于人眼估計(jì)距離的原理,利用兩個(gè)不同的圖像傳感器,固定之間的距離,測(cè)量物體與傳感器之間的夾角,已知兩傳感器之間的距離和物體與兩傳感器之間的夾角,根據(jù)三角測(cè)距定理能夠計(jì)算出物體與無(wú)人機(jī)之間的距離。
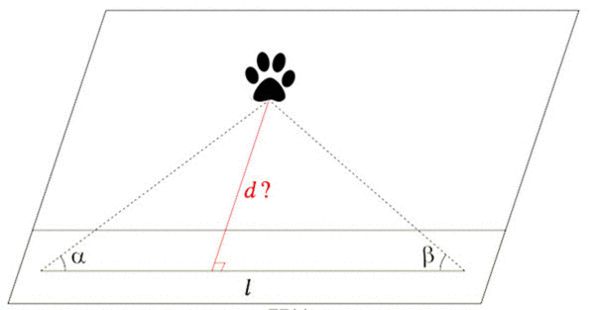
雙目測(cè)距法原理/圖 來(lái)源網(wǎng)絡(luò)
雙目立體視覺(jué)算法由大量的代數(shù)方程組構(gòu)成,對(duì)數(shù)據(jù)的處理量通用巨大,需要多臺(tái)頂級(jí)的計(jì)算機(jī)進(jìn)行協(xié)同計(jì)算,因此如何降低處理器的能耗并提高計(jì)算性能成為了諸多無(wú)人機(jī)廠家面臨的問(wèn)題。
零度 Xplorer 2——激光雷達(dá) TOF
TOF 是 Time of Flight 的簡(jiǎn)寫(xiě),大概意思就是說(shuō)根據(jù)飛行的時(shí)間來(lái)判斷,基本原理依靠傳感器發(fā)射一定頻率的紅外/激光信號(hào),然后根據(jù)反射信號(hào)與原信號(hào)的相位差計(jì)算信號(hào)的飛行時(shí)間,即可換算出距離障礙物的距離。

避障組件/圖 來(lái)源網(wǎng)絡(luò)
在懸停狀態(tài)下,TOF系統(tǒng)會(huì)一直保持快速旋轉(zhuǎn),每秒鐘旋轉(zhuǎn)2-5圈。通過(guò)旋轉(zhuǎn),可以在短時(shí)間內(nèi)完成對(duì)周?chē)行О霃絻?nèi)的360°范圍進(jìn)行快速掃描,從而用較快的速度發(fā)現(xiàn)障礙,然后對(duì)飛控系統(tǒng)發(fā)出調(diào)整位置的指令,以此來(lái)進(jìn)行避障。
在飛行狀態(tài)中,TOF系統(tǒng)則會(huì)停止旋轉(zhuǎn),只把光發(fā)射到前進(jìn)的方向上。固定方向的時(shí)候,在室外的有效距離可以增加到8-10米。檢測(cè)到障礙物之后1秒的反應(yīng)時(shí)間,無(wú)人機(jī)可以用一個(gè)較大的加速度來(lái)停止前進(jìn)。

零度 Xplorer 2/圖 來(lái)源網(wǎng)絡(luò)
就拿零度 Xplorer 2這款產(chǎn)品來(lái)說(shuō),使用的是光相位檢測(cè),頂部類(lèi)似小蘑菇的傳感器發(fā)射出激光雷達(dá),以每秒50次的速率360°快速掃描四周的環(huán)境,繪制出3D模型,將物體的三維輪廓轉(zhuǎn)換為機(jī)器所理解的語(yǔ)言。
TOF激光雷達(dá)的方式較為成熟,但光波容易被干擾這一點(diǎn)也不容忽視,系統(tǒng)發(fā)出的光,必須避開(kāi)太陽(yáng)光的主要能量波段,從而避免太陽(yáng)光的直射、反射等對(duì)避障系統(tǒng)造成干擾。
總結(jié)
上述避障方法基本代表了目前主流的消費(fèi)級(jí)無(wú)人機(jī)對(duì)于避障這件事的解決方案,他們各有優(yōu)劣但都還處于較為初級(jí)的階段,所適用的場(chǎng)景、對(duì)障礙物的識(shí)別以及抗干擾能力都還有很大的提升空間。
其中,雙目測(cè)距法和TOF激光雷達(dá)兩種技術(shù)主要依賴(lài)于傳感器,而搭載 Intel Realsense 的 Typhoon H,其核心是通過(guò)計(jì)算機(jī)視覺(jué)將周?chē)h(huán)境數(shù)字化,以此規(guī)劃對(duì)飛行路線實(shí)現(xiàn)避障。
避障技術(shù)之于無(wú)人機(jī)就像AI大腦之于機(jī)器人,對(duì)于整個(gè)無(wú)人機(jī)產(chǎn)業(yè)來(lái)說(shuō)是一場(chǎng)革命性的創(chuàng)新,一方面可以提高無(wú)人機(jī)的安全指數(shù),另一方面也可以也將降低無(wú)人機(jī)的操作難度。


