







文/張宜方
摘要
伴隨著工業(yè)機(jī)器人的飛速發(fā)展,輔佐工業(yè)機(jī)器人更快、更準(zhǔn)、更靈活地工作的衍生產(chǎn)業(yè)也在悄然崛起。本文針對為工業(yè)機(jī)器人賦予“慧眼”的機(jī)器視覺,著重介紹了二者結(jié)合在機(jī)器人定位引導(dǎo)類項目中的應(yīng)用。內(nèi)容包括定位引導(dǎo)項目的分類與標(biāo)定策略,以及通過軟硬件設(shè)計與實際應(yīng)用中的一些案例,闡明機(jī)器視覺在該類重要應(yīng)用中為機(jī)器人工業(yè)自動化帶來的迅猛提升。
關(guān)鍵詞
機(jī)器視覺 定位引導(dǎo) 標(biāo)定
引言
據(jù)工業(yè)和信息化部2018年9月27日消息,2018年1月至8月,中國工業(yè)機(jī)器人累計產(chǎn)量達(dá)到101,717臺(套),同比增長19.4%。伴隨于此,輔佐機(jī)器人進(jìn)行更高精度、更強(qiáng)適應(yīng)性自動化生產(chǎn)的機(jī)器視覺技術(shù),在近幾年也得到突飛猛進(jìn)的發(fā)展。工業(yè)機(jī)器人與機(jī)器視覺技術(shù)不僅僅局限在工業(yè)生產(chǎn)場景中結(jié)合使用,隨著經(jīng)驗的積累與技術(shù)瓶頸的突破,二者還將扮演更加重要的角色。
機(jī)器視覺與機(jī)器人的完美融合
對于傳統(tǒng)意義上的工業(yè)自動化,工業(yè)機(jī)器人在控制系統(tǒng)的指揮下,重復(fù)特定的動作流程完成加工。換言之,產(chǎn)品加工精度的保障依賴于控制系統(tǒng)的穩(wěn)定性與整個機(jī)械系統(tǒng)的精度。但是加工過程中隨機(jī)誤差的產(chǎn)生在所難免,諸如不可預(yù)測的震動、產(chǎn)品在工位間傳送發(fā)生的偏移等,此外機(jī)械結(jié)構(gòu)隨著長期使用、精度下降帶來的系統(tǒng)誤差還會導(dǎo)致產(chǎn)品批量報廢。而簡單的傳感器對于這些誤差的規(guī)避又顯得捉襟見肘。加上現(xiàn)今產(chǎn)品序列紛繁復(fù)雜,市場對于柔性生產(chǎn)的要求與日俱增,工業(yè)機(jī)器人想要在“失明”的情況下完成這一切就顯得尤為困難。
而當(dāng)工業(yè)機(jī)器人擁有了機(jī)器視覺賦予的“慧眼”,上述問題便迎刃而解。擁有“慧眼”的工業(yè)機(jī)器人在看到目標(biāo)之后,經(jīng)準(zhǔn)確分析定位后引導(dǎo)動作,避免了產(chǎn)品傳送中的偏差,增強(qiáng)了不同產(chǎn)品的生產(chǎn)適應(yīng)性,同時大幅提升產(chǎn)品的加工精度。此外,機(jī)器視覺還能檢測成品的精度,免除人工抽檢帶來的低效、誤差與漏檢。隨著智能制造的深入,具備視覺感知能力的智能設(shè)備益發(fā)盛行,機(jī)器視覺作為前端感知的核心部件,市場需求旺盛。海康機(jī)器人起步于海康威視機(jī)器視覺業(yè)務(wù)部,依托海康威視在圖像傳感、人工智能、大數(shù)據(jù)分析等領(lǐng)域多年的技術(shù)積累,已發(fā)展成為面向全球的移動機(jī)器人、機(jī)器視覺產(chǎn)品和算法平臺提供商,公司堅持自主研發(fā),持續(xù)推動智能制造進(jìn)程。
機(jī)器人定位引導(dǎo)分類
在機(jī)器視覺與機(jī)器人相結(jié)合的應(yīng)用場景中,機(jī)器人引導(dǎo)定位應(yīng)用最為普遍。關(guān)于此類場景,海康機(jī)器人與合作伙伴共同實施了大量成功案例與成熟方案。機(jī)器人定位引導(dǎo)可大致分為3種模式,并進(jìn)而細(xì)分為6小類:

圖1 固定相機(jī)
圖1所示的三種工作方式稱為固定相機(jī)模式,即相機(jī)安裝在設(shè)備機(jī)架上,不隨機(jī)器人的運(yùn)動而運(yùn)動,自左至右又依次分為抓取工況、抓取偏移糾正工況和放置工況。其中抓取工況,相機(jī)對傳送過來的來料進(jìn)行拍攝和粗定位,將定位信息傳輸給機(jī)器人以便機(jī)器人根據(jù)定位信息抓取來料,如此可降低對工位間傳送機(jī)構(gòu)準(zhǔn)確性的要求,確保抓取的穩(wěn)定性;抓取偏移補(bǔ)正工況可通過設(shè)置在機(jī)械臂另一側(cè)的下相機(jī)對工件進(jìn)行二次精準(zhǔn)定位,極大程度上消除來料偏差,確保能有針對性地對每個來料進(jìn)行加工;放置工況內(nèi)容涵蓋廣泛,可以是簡單的放置,亦可以是貼合、安裝等,即使用相機(jī)定位最終的目標(biāo)位,結(jié)合前述兩種工況,真正做到針對每個工件有的放矢。

圖2 運(yùn)動相機(jī)
圖2所示為兩種運(yùn)動相機(jī)模式,即相機(jī)安裝于機(jī)械臂頂端隨機(jī)械臂一同運(yùn)動。雖不同于上述固定相機(jī)模式,但固定相機(jī)模式和運(yùn)動相機(jī)模式在功能上殊途同歸,都可實現(xiàn)定位抓取與引導(dǎo)放置。兩者在保證功能的同時,能夠提供更多的安裝可能性以應(yīng)對不同的環(huán)境與硬件條件限制。

圖3 其他類型
針對不同的設(shè)備安裝場景,為提升硬件安裝的適應(yīng)性,固定相機(jī)模式與運(yùn)動相機(jī)模式也可結(jié)合使用,如圖3所示。
視覺系統(tǒng)設(shè)計
結(jié)合不同場景,應(yīng)用各類型硬件的選型搭配,保障機(jī)器視覺技術(shù)與機(jī)器人有效配合的前提是系統(tǒng)整體的合理設(shè)計與安裝布置。
海螺8是海康威視工廠生產(chǎn)的一款攝像頭,其裝配需完成前蓋定位、泡棉上料、透鏡定位安裝、燈板定位安裝鎖附、前端組件定位安裝鎖附等一系列動作,整個過程應(yīng)用了大量機(jī)器人與機(jī)器視覺聯(lián)合定位引導(dǎo)。如圖4左所示的燈板鎖附工位負(fù)責(zé)燈板鎖附過程中螺釘?shù)膩砹隙ㄎ慌c引導(dǎo)安裝,由于設(shè)備安裝空間的局限性,項目中選擇了空間需求更小、工位更加節(jié)省、安裝更靈活的活動相機(jī)方式。海康威視自主研發(fā)生產(chǎn)的600萬像素面陣相機(jī)配合25mm焦距的500萬鏡頭,連同環(huán)形LED光源安裝在機(jī)械臂末端,隨同機(jī)械臂一同運(yùn)動。
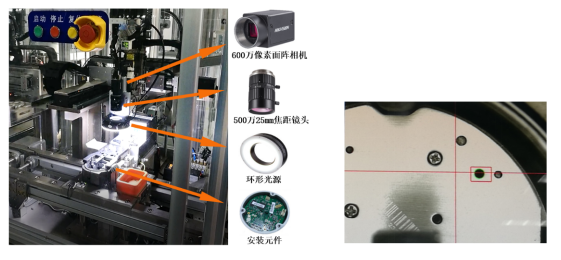
圖4 海螺8視覺系統(tǒng)與成像效果
如圖4左所示燈板定位螺釘安裝工位中,螺孔精度為±0.05mm,這對于視覺與機(jī)器人配合的精度提出了較高要求。相機(jī)連同機(jī)械臂在取料位定位螺釘后,機(jī)械臂前端的吸鐵石準(zhǔn)確吸取螺釘并運(yùn)動至安裝位;相機(jī)在安裝位再次拍照定位螺孔后,螺釘被精確旋緊。
單個螺釘從定位取料到完成安裝整個過程僅耗時不到5秒,且通過視覺定位極大程度提高一次性安裝成功的穩(wěn)定性,避免人工安裝時瞄準(zhǔn)螺孔、效率波動帶來的時間耗費(fèi),人力成本也得到降低。視覺定位的應(yīng)用,在降低成本的同時優(yōu)化加工工藝、提升產(chǎn)能。
基于合理的硬件選型與空間配置,最終得到穩(wěn)定優(yōu)秀的畫面質(zhì)量(如圖4右所示)。借助海康機(jī)器人自主研發(fā)的工業(yè)相機(jī)客戶端MVS和海康威視機(jī)器視覺VM算法平臺,使用模板匹配、圓查找等工具對圖像中的螺孔等特征進(jìn)行精準(zhǔn)分析定位。
標(biāo)定——精度保障的重要環(huán)節(jié)
在設(shè)備最終投入使用前,還會經(jīng)歷一個重要環(huán)節(jié)——標(biāo)定,這也是視覺與機(jī)器人之間的橋梁。
海康威視機(jī)器視覺VM算法平臺中包含成熟的標(biāo)定算法模塊,能在確保標(biāo)定流程開發(fā)高效性的基礎(chǔ)上,讓工程師使用完善的標(biāo)定算法模塊有針對性地為自己量身定制標(biāo)定程序,以此實現(xiàn)標(biāo)定流程的簡潔性、準(zhǔn)確性和復(fù)用性。
在合作伙伴利用海康威視機(jī)器視覺VM算法平臺開發(fā)的某一視覺項目中,設(shè)備需要對三個工位上的三臺相機(jī)分別進(jìn)行標(biāo)定。在精度要求最高、空間條件最好的二工位,即抓取偏移補(bǔ)正工位,固定安裝于機(jī)架的下相機(jī)完成了對帶有角點(diǎn)(有方向性)的點(diǎn)陣標(biāo)定板的11個位姿的采圖,并利用海康威視機(jī)器視覺VM算法平臺中多點(diǎn)標(biāo)定模塊快速實現(xiàn)二工位完整的11點(diǎn)標(biāo)定。一、三工位的相機(jī)只需要對標(biāo)定板進(jìn)行一次圖像采集,通過對比相同特征在不同采圖中的坐標(biāo),得到不同像素級別的相機(jī)之間尺度和角度的變換關(guān)系,即通過坐標(biāo)映射建立與二工位之間的聯(lián)系,完成一、三工位的標(biāo)定。
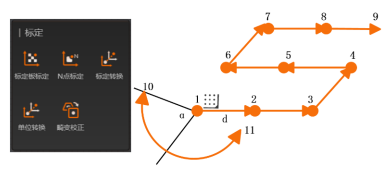
圖5 N點(diǎn)標(biāo)定流程
整個標(biāo)定流程只需采集13張圖片,在不影響精度的情況下,利用坐標(biāo)映射極大程度地精簡了標(biāo)定流程,節(jié)約了開發(fā)和時間成本。至于標(biāo)定流程本身,如圖5,基于已有的模塊,只需根據(jù)機(jī)器人的實際動作在N點(diǎn)標(biāo)定模塊中設(shè)定N點(diǎn)步進(jìn)的距離d和旋轉(zhuǎn)角度α并選擇圖像中進(jìn)行定位的特征,海康威視機(jī)器視覺VM算法平臺會自動按照圖示位姿順序完成標(biāo)定矩陣的計算,供最終圖像坐標(biāo)向物理坐標(biāo)轉(zhuǎn)換時使用。其中特征點(diǎn)可以是諸如圖5實例中的圓、角點(diǎn)線段等的任何特征,這也消除了標(biāo)定板選用的局限性。而旋轉(zhuǎn)角α的引入解決了機(jī)械臂末端旋轉(zhuǎn)軸與執(zhí)行元件的不共軸問題。在此基礎(chǔ)上,完成一、三工位的坐標(biāo)映射乃至更多定制的標(biāo)定流程,整個過程的開發(fā)周期也會大幅縮短。
軟件配合
視覺系統(tǒng)在軟件層面完成的首要任務(wù)是與設(shè)備動作之間的正常通訊,海康機(jī)器人聯(lián)手合作伙伴,在眾多項目的實際操作中完成了與ABB、EPSON、FANUC等諸多工業(yè)機(jī)器人的成功對接。其次,任何系統(tǒng)的開發(fā)最終都會落實在界面的操作,對于操作員來說,操作界面的友好度同樣是確保設(shè)備正常、高效使用的重要因素。
針對不同客戶自身的應(yīng)用案例需求,海康威視機(jī)器視覺VM算法平臺提供多樣性的通訊模塊以應(yīng)對不同的通訊協(xié)議。同樣,海康威視機(jī)器視覺VM算法平臺豐富的SDK也為工程師提供了獨(dú)立自主開發(fā)軟件的可能性,以契合不同的應(yīng)用場景和客戶需求。如圖6是合作伙伴在一個機(jī)器人對位貼合項目中調(diào)用海康威視機(jī)器視覺VM算法平臺SDK編寫的軟件界面。

圖6 標(biāo)定過程采圖
界面主體顯示了相機(jī)的實時采圖,右側(cè)功能頁可設(shè)置包括光源、相機(jī)、視覺方案在內(nèi)的多種選項,并且隨時可以根據(jù)需求的調(diào)整進(jìn)行增減。
結(jié)語
人工智能時代,工業(yè)應(yīng)用對機(jī)器人的訴求早已突破既定重復(fù)的簡單組裝工作,面對當(dāng)下對“延展性”的更高要求,機(jī)器視覺正在逐漸拓寬機(jī)器人的應(yīng)用范圍。
本文立足于機(jī)器視覺與工業(yè)機(jī)器人的結(jié)合,著重介紹了二者在定位引導(dǎo)類項目中的應(yīng)用,并通過硬件系統(tǒng)搭建、標(biāo)定流程設(shè)計、軟件界面設(shè)計的實際案例,闡釋機(jī)器視覺在此類項目開發(fā)中的難點(diǎn)與優(yōu)勢,以期為二者結(jié)合在多領(lǐng)域、深層次的應(yīng)用提供更多寶貴經(jīng)驗。


