在解釋此項技術的論文中,研究人員表示“機器人通過對足中心施展壓力來探索接觸面,根據探索階段中足的旋轉勾畫出可以受力的平衡點”。通過探索和計算,機器人可以決定如何“踩下去”。它還會通過上身的運動,比如揮胳膊,來保持或找回平衡。在測試中,它可以走過崎嶇不平的水泥磚路。
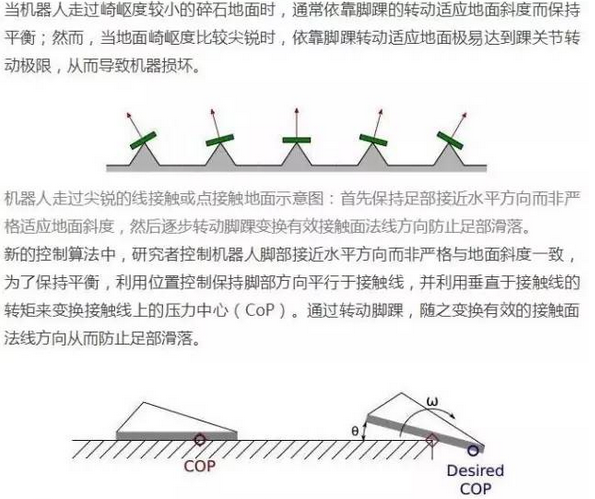
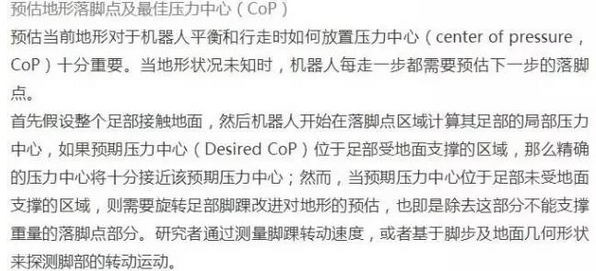

仿真圖:Atlas機器人走過隨機方向的線性踏腳石(上圖),以及點狀落腳點(下圖),每走一步都會預估新的落腳點,控制算法相應的調整機器人步伐。
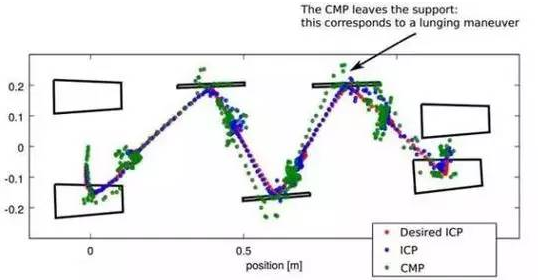
Atlas機器人從左向右行走(俯視圖)的地面參考點實際數據:黑色多邊形指線擬合的落腳點區域,紅點指預期的瞬時捕捉點(Desired ICP),藍點指實際瞬時捕捉點(ICP),綠點指的是機器人的質心矩軸(CMP)。(DeepTech深科技)

【免責聲明】所刊原創內容之本文僅代表作者本人觀點,與新戰略機器人網無關。新戰略機器人網站對文中陳述、觀點判斷保持中立。本網轉載自其它媒體的信息,轉載目的在于傳遞更多信息,并不代表本網贊同其觀點和對其真實性負責。
【版權聲明】凡本網注明“來源:xzl機器人”的所有作品,著作權屬于新戰略機器人網站所有,未經本站之同意或授權,任何人不得以任何形式重制、轉載、散布、引用、變更、播送或出版該內容之全部或局部,亦不得有其他任何違反本站著作權之行為。違反上述聲明者,本網將追究其相關法律責任。轉載、散布、引用須注明原文來源。