






文|賓通
BSLAM自主導航定位系統即BITO SLAM SYSTEM,是AMR等新一代智能移動設備的眼睛,是每一臺智能移動機器人不可或缺的核心模塊。正是由于SLAM技術的突破和發展,才誕生了基于SLAM自然導航的智能移動機器人,它可替代傳統的磁條、磁釘及二維碼導航方式的AGV,不僅可以節省場地改造的費用和時間,同時也可快速完成部署,不影響工廠正常生產。

BSLAM自主導航定位系統是BITO針對移動機器人市場推出的一款具有實時動態建圖與定位功能的軟硬件相結合的產品,基于擴展卡爾曼濾波(EKF)算法、多傳感器信息融合技術,具有靈敏的環境感知與卓越的復雜環境適應能力、穩定的地圖構建與高魯棒性的動態高精度定位能力。SLAM導航定位軟件的性能,對移動機器人的整體性能指標,如穩定性、精度及導航柔性等起著決定性作用,從而進一步影響整機的價格。
賓通智能自研的BSLAM自主導航定位系統(簡稱BSLAM系統),以2D/3D激光雷達為主,輔助以其他傳感器,和移動機器人(AGV/AMR)緊密結合,提供自然激光SLAM導航和定位解決方案,已應用多個工業生產相關場景,例如半導體,3C電子、汽車、包裝及塑化等行業。

技術創新點
★傳感器模型拓展
基于經典的激光雷達傳感器模型進行拓展,引入更加復雜的噪聲描述(非高斯分布,噪聲分布隨雷達啟動時間變化),用以更加精確地描述激光雷達特性;
★時變地圖
基于經典的地圖模型(大多為靜態模型)進行拓展,引入時間,構造時變地圖模型;該時變地圖模型能夠描述工廠生產邏輯,進而將生產環境中人員走動,物體移動,門開閉納入模型;
★算法精度提升
基于上述兩點,改進已有的SLAM算法和BSLAM軟件;在SLAM過程中,構建時變地圖模型,在定位過程中,利用時變地圖模型進行定位,提高動態環境中定位精度;
★算力優化
在上述的算法改進過程中,合理控制算法復雜度,避免因為模型拓展和算法改進而引起算力的大量消耗。
核心特點
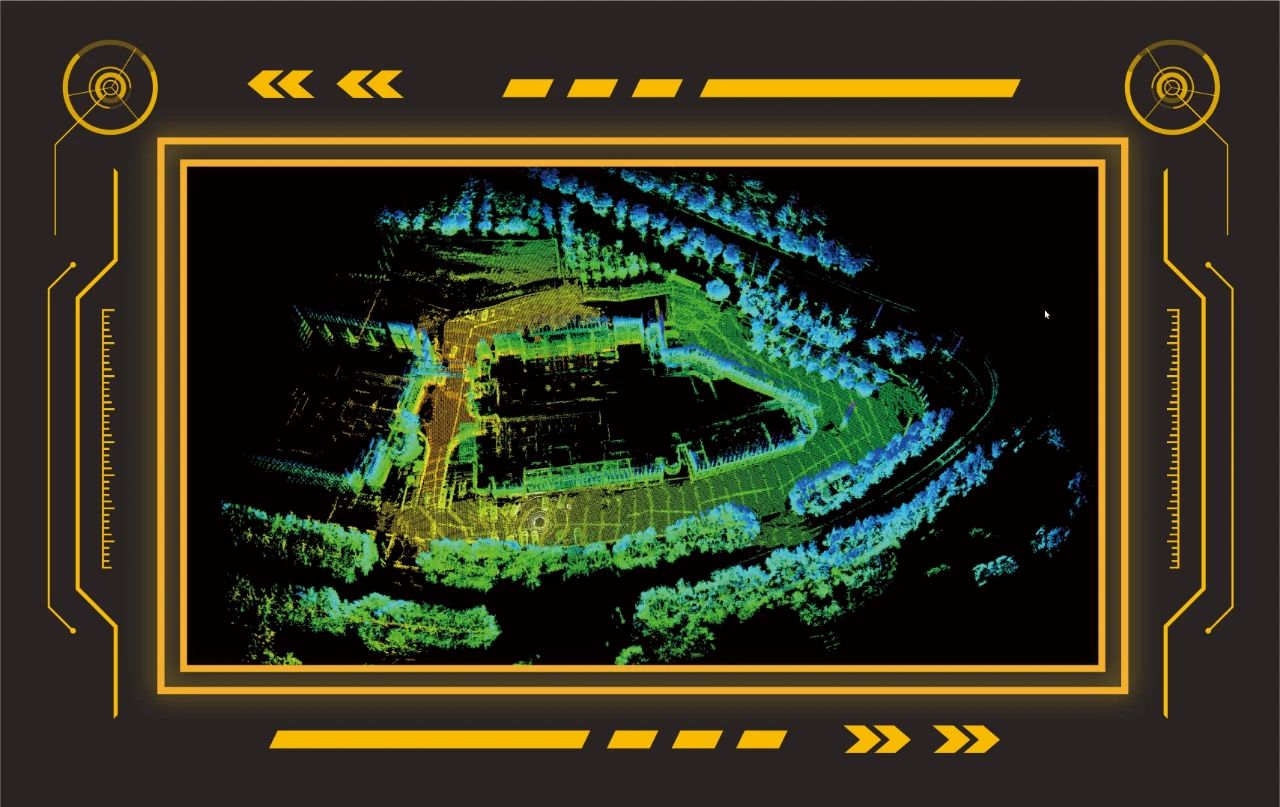
超大面積建圖,高精度定位建圖:
2D、3D高精度穩定建圖,支持百萬平面超大地圖構建,系統可自主探測閉環,并及時修正
穩定可靠,性能卓越:
在復雜多變環境中,不限于室內室外、無光、低光線、雨雪天氣等,系統仍可實現高精準定位和準確完整的地圖構建;
無需改造,導入便捷:
無需進行場景改造,可快速現場部署,友好的圖形化交互界面,上手簡易,操作簡單,同時系統可自查各種故障,準確顯示具體故障問題,便于快速介入后解決問題。
自主初始定位及任意位置重定位:
移動機器人開機后,BSLAM系統可自主對設備位置進行定位,同時也可實現移動機器人在任意位置的重新定位。

BSLAM系統支持標準協議
BSLAM系統為具有二次開發能力的集成商客戶提供標準的接口文檔,供客戶自有的單機控制系統集成,系統提供基于ROS和TCP/IP協議的接口。
BSLAM系統支持兩種產品形態
SDK 軟件包形式:可直接安裝在客戶的電腦或單機控制器上;
BANS單機控制器/IPC+軟件包形式:軟硬件一體,方便沒有硬件控制器的客戶使用。
BSLAM系統的好搭檔—BANS單機控制系統
BANS 單機控制系統
BITO Autonomous Navigation System是一款基于自然激光SLAM導航方式的控制器,是集智能導航控制軟件與豐富通信接口為一體的軟硬件相結合的通用型移動物流設備(AGV/AMR/AGF)控制器。
作為個體機器人的大腦,BANS可兼容多類型底盤、傳感器和驅動器,賦予設備感知、理解和行動能力,幫助用戶快速完成智慧工廠移動類物流設備的智能化升級改造。
BITO從2017年成立開始就在智能制造領域深入探索,并始終堅定不移地以普及智能制造基礎設施為企業使命,成功將實驗室的先進技術轉化為產品,并應用于實際工廠場景,助力制造業轉型。目前賓通智能已經服務了半導體、3C電子、汽車及零部件、航空航天、FA金屬加工、高端裝備、物聯網等多個行業領域標桿客戶。
隨著5G、大數據、人工智能、區塊鏈等技術的不斷發展,賓通智能將通過領先的AI智能算法幫助客戶解決各種復雜場景問題,用新技術為企業賦能,推動人工智能技術與制造業的深度融合,最終為企業實現提質增效。未來,賓通將繼續推行人工智能技術產業化落地戰略,助力企業實現數智化升級與變革。


